
Czy ktoś nie marzył o prywatnym barmanie w swoim domu? Użytkownik forum forbot.pl zaprojektował i z pomocą druku 3D stworzył urządzenie do precyzyjnego nalewania drinków.
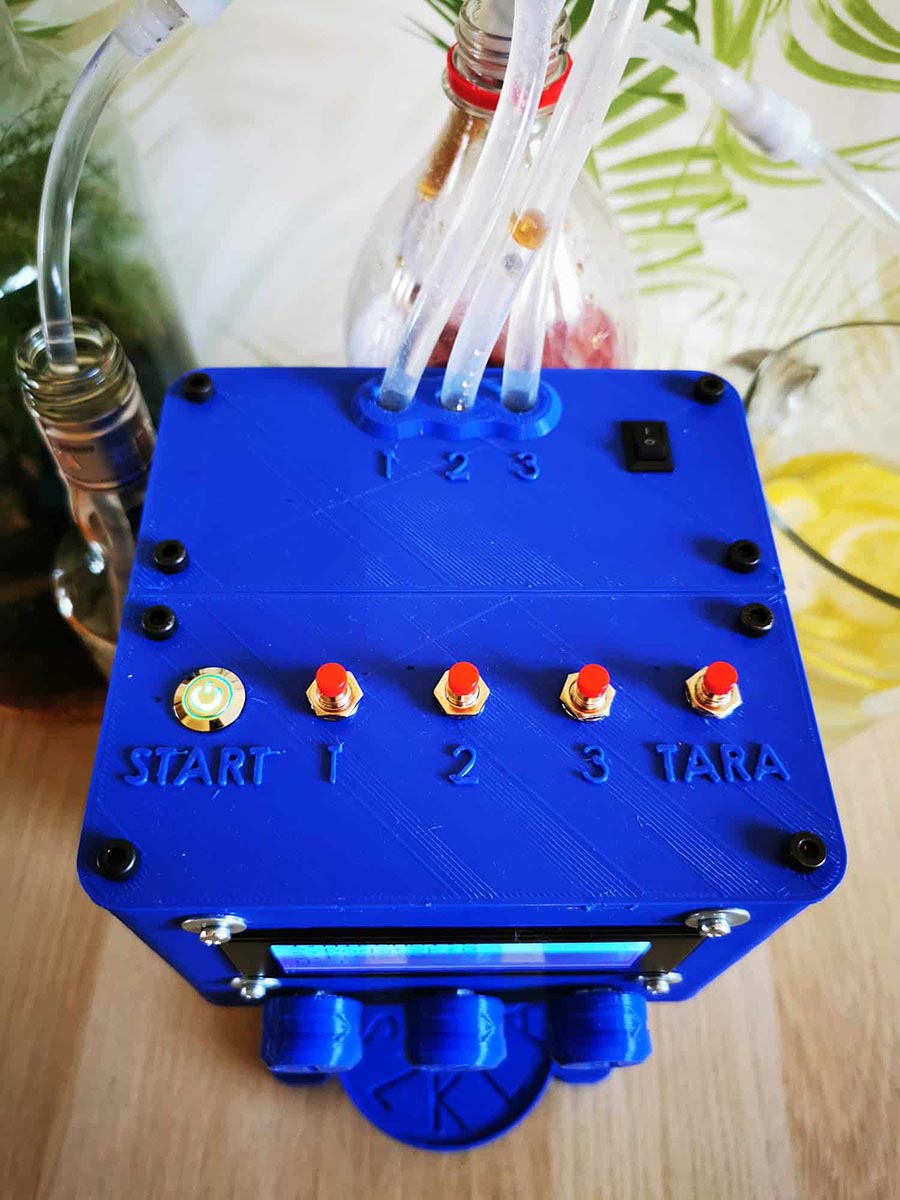
Użytkownik Kasztan założył, że robot będzie zdolny do miksowania 3 różnych substancji, co do domowego urządzenia nalewającego drinki w zupełności wystarczy. Jak pisze autor projektu, w konstrukcji domowego barmana zastosował pompki membranowe z zaworami zwrotnymi, które sprawiają, że ciecz z podajnika po nalaniu substancji sama nie wycieka. Ciekawą rzeczą jest zastosowanie wbudowanej wagi, odmierzającej dokładną ilość nalewanej substancji. Jest ona realizowana za pomocą wyskalowanej belki tensometrycznej i wzmacniacza HX711.
Ze względu na potrzebę dużej ilości wejść i wyjść poszczególnych części wykonawczych autor zastosował płytkę Arduino Mega, a do sterowania pompek dozujących – gotowego Shielda L293D, dzięki czemu można bez problemu sterować czterema silnikami DC. Dodatkowo jak pisze, całość zajmuje mało miejsca w obudowie, a założeniem było zrobić konstrukcję zwartą i jak najmniejszą.
Do przejrzystej obsługi zamontowany został wyświetlacz 4×16, przez co każdy składnik ma swoją pełną nazwę w osobnej linijce. Dla każdego z trzech potencjometrów można ustawić ilość substancji od 0 do 150g. W przypadku przekroczenia sumy substancji powyżej 250g zamontowane diody RGB świecą na czerwono.

Po ustaleniu odpowiednich proporcji, wystarczy wcisnąć przycisk start, a domowy barman naleje wybrane substancje w odpowiedniej ilości.
Obudowa została wydrukowana na drukarce 3D metodą FDM/FFF. Składa się ona z wielu elementów w celu krótszego wydruku pojedynczej części. Dodatkowo zostało umieszczone okno rewizyjne, żeby mieć dostęp do płytki Arduino.
Części użyte do budowy domowego barmana.
- Arduino ATmega2560 – 1szt.
- wyświetlacz LCD 4×20 – Niebieski – ze sterownikiem kompatybilnym z HD44780 – QC2004A
- konwerter I2C do wyświetlacza LCD HD44780
- wzmacniacz do belki tensometrycznej HX711 – 1szt.
- belka tensometryczna 1kg – 1szt
- pompa do cieczy 12V 110l/h – 7mm – 3szt
- moduł sterownika silnika L293 UNO MEGA shield – 1szt
- moduł diody RGB 5V – 2szt,
- wtyk DC 2,1/5,5mm z zaciskami skręcanymi – 1szt.
- gniazdo DC 2,1/5,5 do obudowy plastikowe -1szt.
- zasilacz wtyczkowy UMEC impulsowy 12V 30W 2,5A – 1szt.
- przełącznik kołyskowy 15x10mm – 1 szt
- przewody połączeniowe
- przycisk podświetlany – 1szt.
- przycisk okrągły monostabilny chwilowy czerwony – 4szt.
- potencjometr liniowy 1K – 3szt.
- zawór zwrotny – 3szt.
- wężyk silikonowy 1,5m
Na poniższym filmie można zobaczyć działanie robota:
Po więcej szczegółów projektu zapraszamy na forum forbot.pl
A Kasztanowi gratulujemy pomysłowości i myślę, że załatwił sobie niezłego barmana na zbliżającego się Sylwestra 😉